-

沈阳固锐科技有限公司
主营:沈阳焊接机器人,沈阳上下料搬运机器人,沈阳打磨喷涂机器人

沈阳固锐科技有限公司
主营:沈阳焊接机器人,沈阳上下料搬运机器人,沈阳打磨喷涂机器人 7
7

焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
焊接机器人主要包括机器人和焊接设备两部分。
焊接机器人的分类:(1)点焊机器人(2) 弧焊机器人点焊对所用的机器人的要求都比较低。因为点焊只需点位掌握,至于焊钳在点与点之间的移动路径没有严格技术要求。这也是焊接机器人早只能用来点焊的原因。点焊用机器人不仅要有足够的负重能力,而且在点与点之间移位时速度要迅速,过程要平稳,定位要精准,以减少工作的时间,提升机械臂工作效率。点焊机器人需要有的负载能力,取决于所用的焊钳样式。
弧焊机器人的特征:弧焊过程比点焊过程要复杂一些,工具中心点(TCP),也就是焊丝端头的运动路径、焊枪的姿态、焊接的参数都要求精确掌控。所以,弧焊用机器人除了前面所述的基础功能外,还必须具备一些适应弧焊要求的功能。即使从理论上讲,有5个轴的焊接机器人就可以用来电弧焊,但是对复杂形状的焊缝,用5个轴的机器人却比较难做到。因此,除非焊缝比较单一,否则应尽量采用6轴机器人。河南*焊接机器人公司是国内专业的生产制造商。
机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。
焊接机器人中还有一种点焊机器人,尤其汽车工业是点焊机器人系统一个典型的应用领域。
初,点焊机器人只用于增强焊作业(往已拼接好的工件上增加焊点),后来为了保证拼接精度,又让机器人完成定位焊作业性能,具体来说有:
安装面积小,工作空间大;
快速完成小节距的多点定位
定位精度高(±0.25㎜),以确保焊接质量;
持重大(50~100㎏),以便携带内装变压器的焊钳;
内存容量大,示教简单,节省工时;
点焊速度已生产线相匹配,同时按全可靠性好。
点焊机器人由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成,由于为了适应灵活动作的工作要求,通常电焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。
在产品更新换代时只需要从新根据更新产品设计相应工装夹具,机器人本体不需要做任何改动,只要更改调用相应的程序命令,就可以做到产品和设备更新。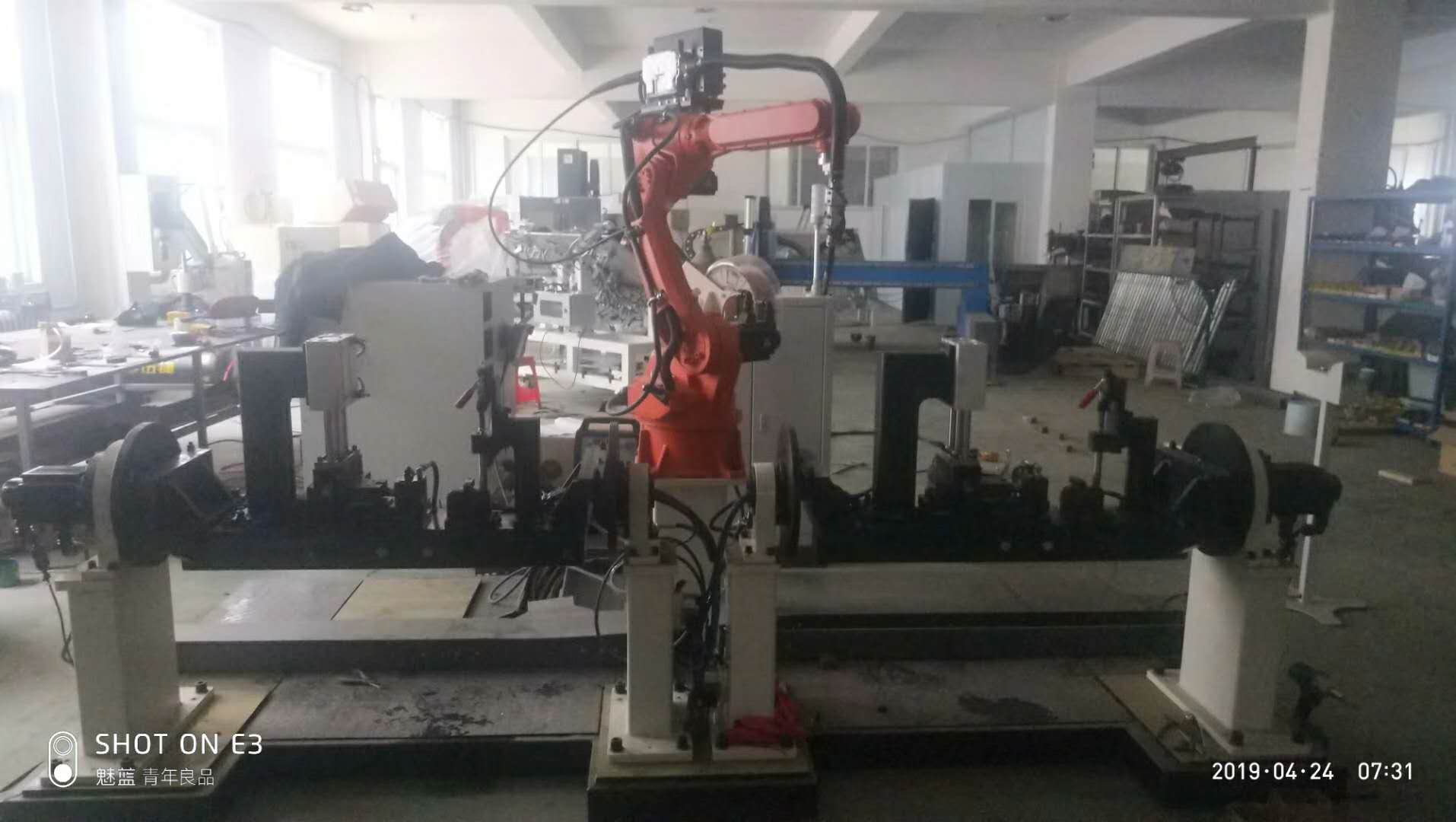
适合的才是的,这也是我们在帮助客户做选型和工装的时候一直强调的,每一个工装都是根据客户的产品进行专业化定制的