-

沈阳固锐科技有限公司
主营:沈阳焊接机器人,沈阳上下料搬运机器人,沈阳打磨喷涂机器人

沈阳固锐科技有限公司
主营:沈阳焊接机器人,沈阳上下料搬运机器人,沈阳打磨喷涂机器人 7
7

机器人焊接时的主要注意事项
1.必须进行示教作业
2.必须确保工件的精度
3.焊接条件的设定取决于示教作业人员的技术水平
4.必须充分注意安全
机器人是一种高速的运动设备,在其进行自动运行时不允许人靠近机器人(必须设置安全护栏)。
操作人员必须接受劳动安全方面的专门教育,否则不准操作。
焊接规范的设定。起弧、收弧参数。
摆动功能。摆动频率、摆幅、摆动类型的设定。
焊接传感器。起始点检测、焊缝跟踪传感器的接口功能。
焊防碰功能。当焊受到不正常的阻力时,机器人停机,避免操作者和工具受到损坏。
多层焊功能。应用该功能可以在层焊接示教完成后,实现其余各层的自动编程。
再引弧功能。引弧失败后,自动重试。因此消除了焊接异常(引弧失败)发生时引起的作业中断,大限度避免了因此而引起的全线停车。
焊校正功能。焊与工件发生碰撞时,可通过简单操作进行校正。
粘丝自动解除功能。焊接终了时如果检测出焊丝粘丝,则自动再通电解除粘丝,因此不必手工剪断焊丝。
断弧再启动功能。出现断弧时,机器人会按照*的搭接量返回重新引弧焊接。因此无须补焊作业。
机器人焊接容易安排生产计划
由于机器人可重复性高,只要给定参数,就会永远按照指令去动作,因此机器人焊接产品周期明确,容易控制产品产量。机器人的生产节拍是固定的,因此安排生产计划十分明确。准确的生产计划可应使企业的生产效率、资源的综合利用做到大化。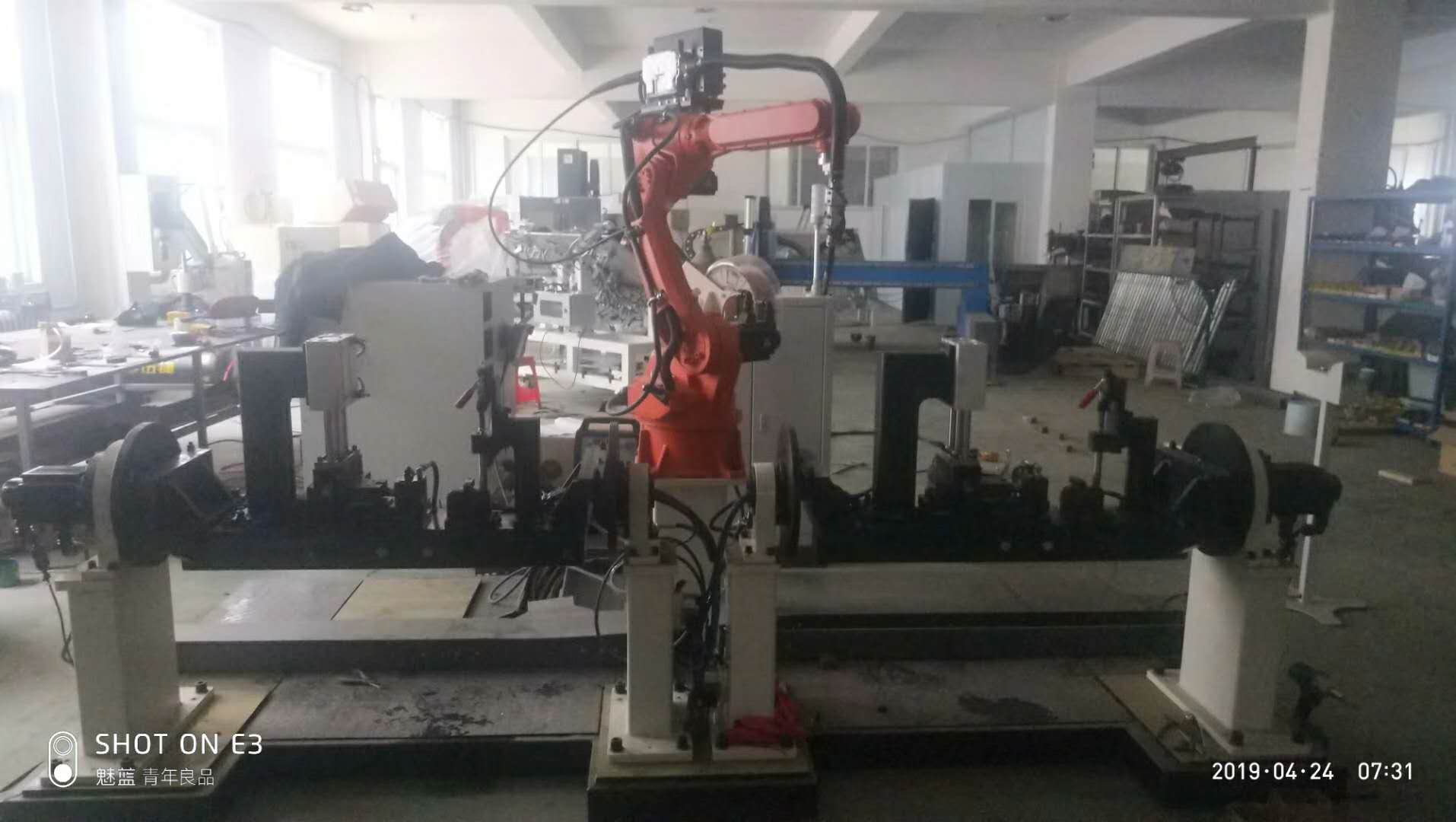
六轴焊接机器人不只可以用于焊接,还可以用于等离子切割和搬运上下料,但是想用于喷涂的老板们要注意了,喷涂机器人要使用有防爆资质的哦
焊接机器人中还有一种点焊机器人,尤其汽车工业是点焊机器人系统一个典型的应用领域。
初,点焊机器人只用于增强焊作业(往已拼接好的工件上增加焊点),后来为了保证拼接精度,又让机器人完成定位焊作业性能,具体来说有:
安装面积小,工作空间大;
快速完成小节距的多点定位
定位精度高(±0.25㎜),以确保焊接质量;
持重大(50~100㎏),以便携带内装变压器的焊钳;
内存容量大,示教简单,节省工时;
点焊速度已生产线相匹配,同时按全可靠性好。
点焊机器人由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成,由于为了适应灵活动作的工作要求,通常电焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度:腰转、大臂转、小臂转、腕转、腕摆及腕捻。