-

沈阳固锐科技有限公司
主营:沈阳焊接机器人,沈阳上下料搬运机器人,沈阳打磨喷涂机器人

沈阳固锐科技有限公司
主营:沈阳焊接机器人,沈阳上下料搬运机器人,沈阳打磨喷涂机器人 8
8
点焊机器人的驱动方式有液压驱动和电气驱动两种
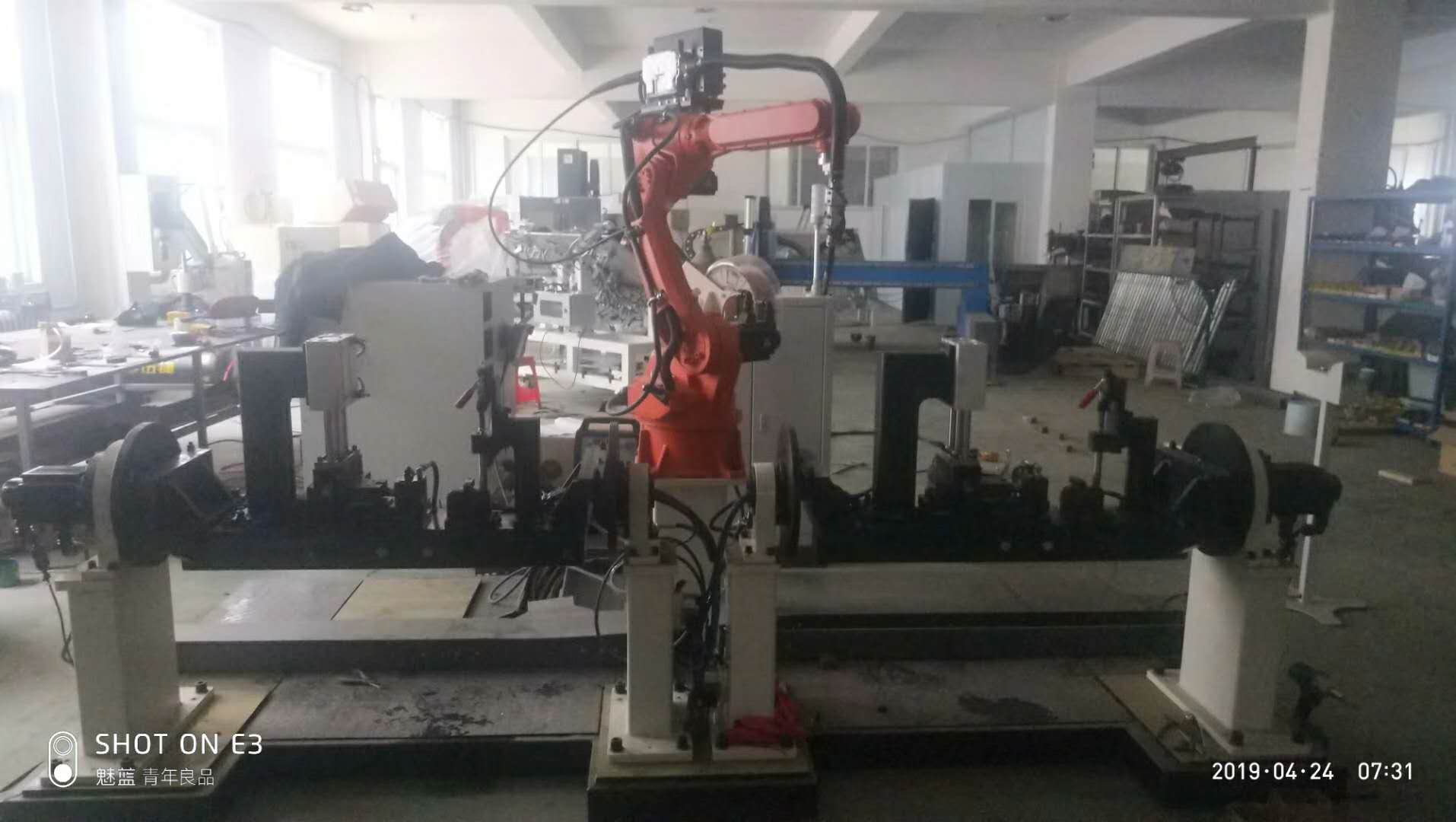
在产品更新换代时只需要从新根据更新产品设计相应工装夹具,机器人本体不需要做任何改动,只要更改调用相应的程序命令,就可以做到产品和设备更新。
六轴焊接机器人的技术要求:
焊接机器人也就是我们所说的机械手焊接对所焊接工件的要求也很严格,严格但不苛刻,一切都是为了生产更好的产品。
由于机械手采取示教式编程,通过对行走路径及焊接电流的记忆储存批量化的焊接重复的路径,所以重复从同一起点位置起弧--行走记忆中的路径--同一收弧点收弧,这就要求工件的位置和前期切割下料需要达到机器人所允许的误差内,一般氩弧自熔对误差要求比较高,气保焊厚板的焊接要求较低,因为可以加摆动焊接,具体情况具体分析,同时在厚板的焊接时,很多时候都会产生热变形,所以大多数的情况下,机器人都是需要和工装夹具配合着工作的,通过手动或气动工装夹具的配合来保证工件焊接后的或水平度或同轴度等要求。
产品周期明确,容易控制产品产量。
机器人的生产节拍是固定的,因此安排生产计划非常明确。
问:焊接机器人是二保焊还是氩弧焊?
答:焊接机器人有气保焊系统也有氩弧焊系统,根据客户需求选配。一般氩弧焊机器人比气保焊机器人价格更高一些,因为氩弧焊的焊接工艺需要机器人的精度更高。运行更平稳。